Grabby Hands
-
Objective
Design a 3D printed assembly that performs a specific mechanical function while taking advantage of the material properties of two different 3D printed materials.
-
Outcome
High temperature tongs with mini hands on the end because why the heck not?? Specific use case is for putting sugar cubes in tea.

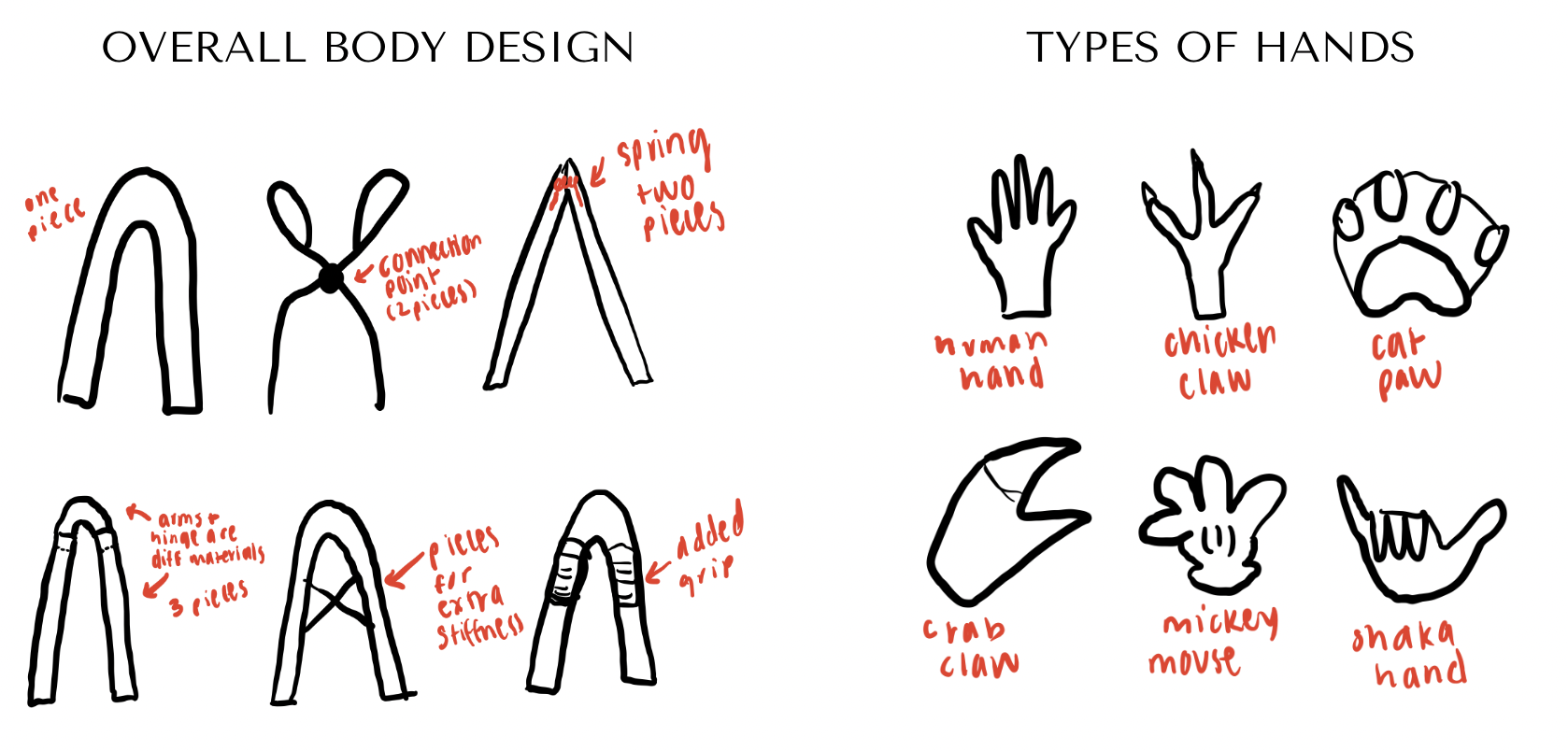
Original Ideation
Material Exploration
For the body, it is critical that it deflects without breaking while also providing enough stiffness to hold a sugar cube. However, the problem we ran into was that the tongs were so flexible that it could not actually pick up anything. Initially, we tried to increase the stiffness simply by choosing materials with larger elastic modulus.

Geometric Manipulation
Manipulating only material properties did not provide the required stiffness to actually grip items. To fix this, we chose to manipulate geometry in target areas such as the arms while leaving the hinge part flexible.

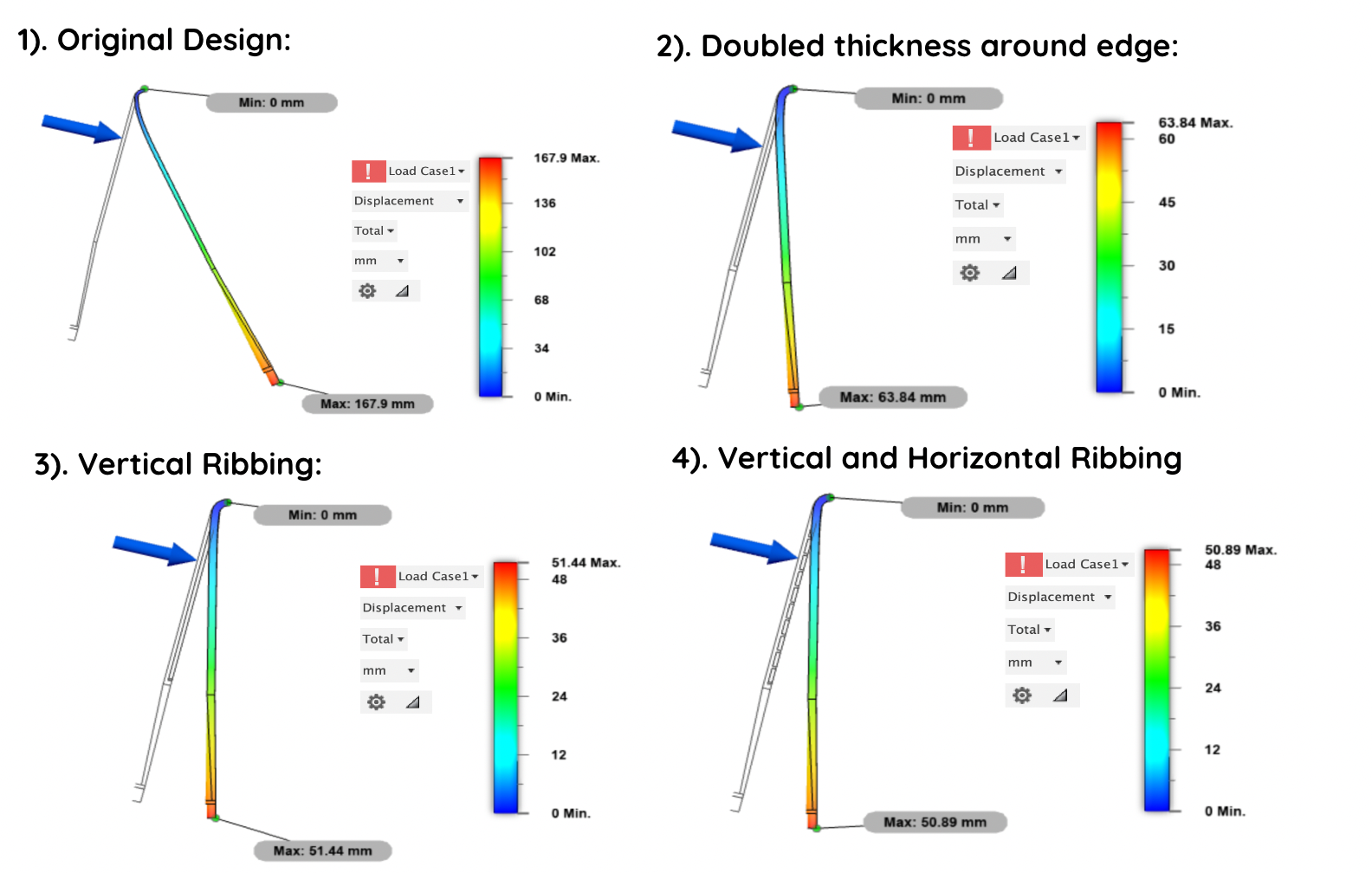
By simply doubling the thickness around the edge of the tongs body (and thus manipulating the cross section and area moment of inertia), the stiffness was increased by a factor of 2.6! Adding vertical ribbing further increased the stiffness of the arms by a factor of 1.3. However, as expected, horizontal ribbing does not provide further support. Thus, the increase in material is justified for the vertical ribs, but not for the horizontal ribs. These simulations allowed us to move forward with the vertical ribbed body as our final design.






